Тракторист категории «В»
Устройство и технические характеристики одноковшового универсального экскаватора с механическим приводом
В цикл работы экскаватора с любым землеройным видом рабочего оборудования входят следующие операции:
— наполнение ковша;
— подъем груженого ковша;
— поворот на выгрузку;
— выгрузка;
— поворот в забой; опускание ковша в забой.
В процессе работы некоторые операции цикла можно совмещать, например поворот в забой и подъем или опускание ковша.
Для осуществления всех операций цикла в конструкции одноковшового экскаватора с механическим приводом предусмотрены следующие основные механизмы:
— подъемно-тяговая лебедка с двумя канатными барабанами (драглайн, обратная лопата, грейфер) или одним барабаном и цепной звездочкой для напора-возврата рукояти (прямая лопата);
— стрелоподъемная лебедка;
— механизм поворота;
— механизм передвижения;
— главный реверс; механизм открывания днища ковша прямой лопаты.
Подъемно-тяговая лебедка служит для осуществления движения ковша экскаватора при копании и перемещения его. Лебедка имеет два канатных барабана — напорный и тяговый. У драглайна и обратной лопаты барабаны приводятся во вращение двигателем в одну сторону, а в другую сторону барабаны вращаются под действием натяжения подъемного каната и массы рабочего оборудования. У прямой лопаты напорный барабан при канатном или цепном напоре вращается двигателем в обе стороны. Для принудительного опускания груза на режиме двигателя подъемный барабан крана также вращается двигателем в обе стороны.
Каждый барабан имеет ленточный тормоз для удержания ковша или груза, а для приведения барабана во вращение от двигателя — фрикционные устройства. Для возможности работы различными видами сменного рабочего оборудования канатные барабаны часто имеют разъемную конструкцию и их можно заменять при перемонтаже.
По конструкции привода одноковшовые универсальные экскаваторы бывают одно- или многомоторными. Из выпускаемых нашей промышленностью строительных и карьерно-строительных экскаваторов только экскаватор Э-2503 имеет многомоторный привод.
Рассмотрим в качестве примера кинематическую схему экскаваторов Э-1251Б (Э-1252Б).
Привод всех механизмов экскаватора осуществляется от двигателя D. Барабаны при всех видах рабочего оборудования являются подъемными (прямая и обратная лопата, драглайн) и различаются между собой диаметром. Барабан служит тяговым для обратной лопаты и драглайна. Привод цепного напора механизма прямой лопаты осуществляется от звездочки. При канатном зависимом напоре возврат рукояти осуществляется барабаном. Барабаны и напорная звездочка вращаются двигателем при включении фрикционных муфт Ф1 и Ф2, соединяющих их с приводным валом главной лебедки I, и удерживаются тормозами Ti и Т2. Принудительное вращение напорной звездочки прямой лопаты (возврат) и кранового барабана на опускание осуществляется цепью через звездочки включением фрикционной муфты Ф3, соединяющей звездочку с валом механизма реверса II, который вращается двигателем.
Для установки рабочего оборудования в необходимое положение с помощью подъема или опускания стрелы служит стрелоподъемная лебедка, приводимая во вращение при включении в зацепление шестерни с шестерней.
Механизм поворота служит для приведения во вращение поворотной части экскаватора относительного ходового устройства. Включение механизма осуществляется муфтой Ми соединяющей вал поворота с шестерней. Для торможения поворотной части служит тормоз.
Механизм передвижения состоит из верхнего V и нижнего VI ходовых механизмов. Верхний ходовой механизм включается в работу муфтой, соединяющей вертикальный вал хода с шестерней. При неработающем механизме поворота IV гусеничный ход тормозится тормозом. Муфты, нижнего ходового механизма гусеничного экскаватора соединяют в одном крайнем положении полуоси хода с горизонтальным валом, а в другом крайнем положении стопорят полуоси относительно ходовой рамы.
Механизм реверса служит для плавного включения и изменения направления вращения трансмиссии экскаватора, приводящей во вращение поворотный и ходовой механизмы, а также стрелоподъемную лебедку. Управляют реверсом фрикционные муфты.
Механизм открывания днища ковша прямой лопаты приводит в движение засов, закрывающий днище ковша. В большинстве экскаваторов днище ковша открывается канатом с приводом от гидро- или пневмоцилиндра, установленного на стреле.
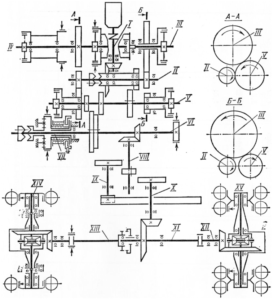
Рис. 6. Кинематическая схема экскаватора Э-302Б: 1 и 11— валы привода редуктора и первой передачи; III и IV — левая и правая части лебедки; валы: V — реверса, VI — перемены скоростей, VII — стрелоподъемной лебедки; VIII—X — вертикальные валы главного редуктора, механизма поворота, ходового редуктора; XI и XII — валы горизонтальный ходового редуктора и ведущий заднего моста; XIII — промежуточный вал; XIV и XV—передняя и задняя полуоси
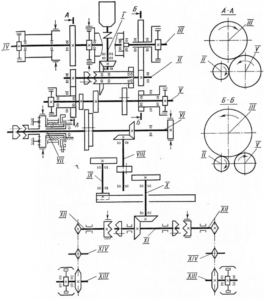
Рис. 7. Кинематическая схема экскаваторов ЭО-3111В и Э-304В: 1 и 11 — валы привода редуктора и первой передачи; III и IV — левая и правая части лебедки; валы: V — реверса, VI— перемены скоростей, VII — стрелоподъемной лебедки, VIII — вертикальный главного редуктора, IX — механизма поворота, X— вертикальный ходового механизма, XI — промежуточный, XII — концевой, XIII — ведущего колеса; XIV — ось натяжного устройства
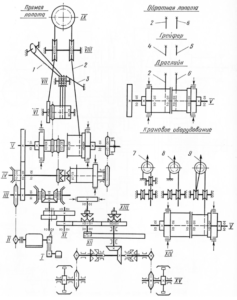
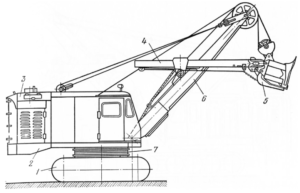
Рис. 8. Кинематическая схема экскаватора Э-652Б: валы: / — компрессора, // — двигателя, /// — горизонтальный реверсивного механизма, IV — реверса главной лебедки и стрелового барабана, V — главной лебедки; оси: VI — напорного барабана, VII — блоков, VIII — головных блоков, IX -— блока ковша; валы реверсивного механизма: .X — вертикальный, XI — промежуточный; XII —вал поворотного механизма; валы ходового механизма: XIII — вертикальный, XIV— горизонтальный; XV — ось ведущего колеса; канаты: 1 — напорный, 2 — подъемный, 3 — возвратный, 4 — замыкающий, 5 — поддерживающий, 6 — тяговый; крановое оборудование: 7 —с наголовником, 8 — двухкратная запасовка, 9 — трехкратная запасовка
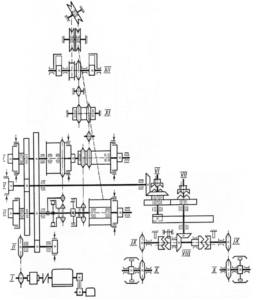
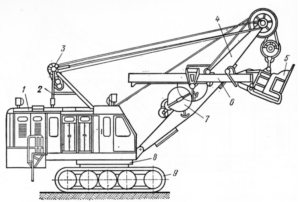
Рис. 9. Кинематическая схема экскаватора Э-10011Д: валы: I — ведущий, II — промежуточный; III и V — задний и передний валы лебедки; валы: IV — реверса, VI — поворотный, VII — вертикальный хода, VIII — горизонтальный хода; IX — полуоси; X — вал ведущего колеса; XI — ось; XII — вал напорного механизма
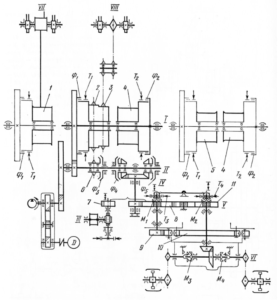
Рис. 10. Кинематическая схема экскаватора Э-1251Б (Э-1252Б): и — главная и стрелоподъемная лебедки; II и IV—механизмы реверса и поворота; V и VI — верхний и нижний ходовые механизмы; VII и VIII — зависимый и независимый напорные механизмы; Ф,—Ф6 — фрикционные муфты; Г —Т, — тормоза; Mi — Mt — кулачковые муфты; Д — двигатель; 1, 4. и 5 — барабаны, 2, 3 и 6 — звездочки, 7—11 — шестерни
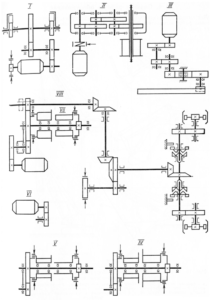
Рис. 11. Кинематическая схема экскаватора Э-2503: механизмы: I — напора, III— поворота, VI — открывания днища ковша, VIII — хода; лебедки: II — подъема стрелы при работе с оборудованием драглайн, IV — драглайна, V—крана, VII — подъема ковша